Gen
-
Compteur de contenus
3 764 -
Inscription
-
Dernière visite
-
Jours gagnés
5
Type de contenu
Calendrier
Profils
Forums
Blogs
Galerie
Articles
Variétés
Breeder
Grow Report
Smoke Report
Produits
Marque
Guides
Tout ce qui a été posté par Gen
-

Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
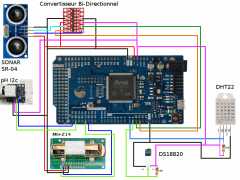
Salut à tous, J'ai trouvé un peu de temps pour vous faire le schéma de câblage De la manière dont j'ai écrit le code, vous pouvez si nécessaire permuter les fils D2-D3 mais aussi D4-D5, car je ne tiens pas compte du sens de fonctionnement, à chaque détection, le process inversera le sens du moteur qui l'a amené à être détecté. N'oubliez pas l'alimentation de votre arduino !! Amusez-vous bien et bon bricolage ++ GEN
-
Depuis l’album : GENDUINO
-
Reuh Voici le code. #define TRIMPIN A0 #define RELAY1 2 #define RELAY2 3 #define IRSENSOR1 4 #define IRSENSOR2 5 byte maxWaitingDurationInSecond = 30; // 0 to 255 plage d'attente max long waitingTime; void setup() { pinMode(TRIMPIN , INPUT); pinMode(RELAY1 , OUTPUT); pinMode(RELAY2 , OUTPUT); pinMode(IRSENSOR1, INPUT); pinMode(IRSENSOR2, INPUT); digitalWrite(RELAY1, HIGH); digitalWrite(RELAY2, HIGH); } void inverseRelay(void) { if(digitalRead(RELAY1) == HIGH) { digitalWrite(RELAY1, LOW); } else {
-
Yop. Pour la commande, tu trouveras ton bonheur là : https://www.cannaweed.com/topic/201946-gdw-8-commande-light-rail-avec-temporisation-en-cours/ ++ GEN
-
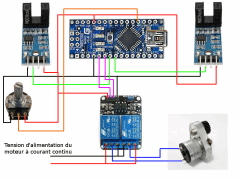
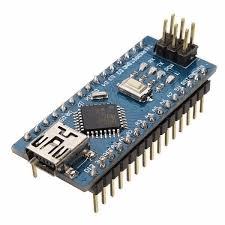
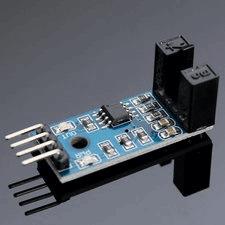
Salut à tous Au programme du jour, la réalisation de la partie commande moteur à courant continu pour light rail, avec temporisation de bout de course réglable (prix total ~ 10€) Comme carte, j'utiliserai un arduino nano et son shield Avant : Après : le tout monté : Pour la partie détection et commande j'utiliserai un platine à 2 relais pour arduino Ainsi que 2 capteurs infra-rouges Et pour régler la temporisation j'utiliserai un potentiomètre de 10KOhms linéaire Pour les puristes qui désireraient pouvoir également régler la vitess
- 11 réponses
-
- 10
-

-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
Depuis l’album : GENDUINO
-
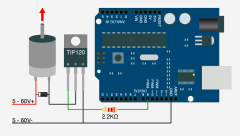
Bonjour, Aujourd'hui je vous propose un montage permettant de contrôler la vitesse d'un moteur à courant continu, à l'aide d'un arduino. pour ce faire vous aurez besoin de : Arduino Une diode 1N4001 Une résistance de 2.2KOhm 1/4W Un transistor TIP120 Darlington ou équivalent (< 2€ sur la baie) Un moteur, ventilateur, pompe ... de 5 à 60v Une source de courant adaptée au moteur utilisé Fils, cables, soudure etc.. le code : int tip120PIN = 9; // PMW pin 9 void setup() { pinMode(tip120PIN, OUTPUT); // Définition de la pin en SORTIE } void loop() {
-
Depuis l’album : GENDUINO
-
Bonjour.. Suite à de nombreuses demandes concernant l'utilisation de classes, je remarque que pour les néophytes, l'utilisation de classes ressemble plus au parcours du combattant, qu'à une partie de plaisir ! Je vais essayer de vous en faire comprendre non seulement le concept, mais aussi en démystifier les choses qui vous font peurrrrrrrrrr (j'insiste sur le RRRRRRR) Alors commençons par le début, ou débutons par le commencement (c'est vous qui voyez) Qu'est-ce qu'une classe ? Tout d'abord, sachez que les informaticiens sont de grands paresseux, j'ai pas dit fainéants, j
-
reuh . si tu ouvres avec un éditeur standard, c'est normal (il faut peut-être lui spécifier "retour automatique de ligne). Avec l'éditeur de l'environnement, il n'y a aucun souci. ++ GEN
-
bien sur ... unixTime() renvoie des minutes, c'est nouveau ? quand je me casse le derche à documenter une classe fo lire pinpin, c'est pas pour faire bô ! (voir fichier .h) et qu'est ce qu'on y trouve.... ? MAGIK ! class CyclicTimer { public: // Déclaration de l'objet CyclicTimer(int IO_Pin, bool invertedRelay = false); // initialise les temps par catégorie // param 1 = DAY_DURATION_ON etc.. // param 2 = durée en secondes ....... C'te jeunesse des fois, j'vous jure ++ GEN
-
reuh Plus que tu ne le penses Courage ! ++ GEN
-
yop. pas du tout. LoL 1 - Pour connaitre l'état du I/O il faut utiliser suivant le cas, la commande digitalRead() ou analogRead() 2 - pour la définition du mode croissance ou floraison via un interrupteur il faut que l'interrupteur soit d'un coté branché au 5v et de l'autre à l'I/O, l'usage d'une résistance est nécessaire et d'un condensateur pour éviter les rebonds 3 - ensuite il ne te reste plus qu'à aller lire l'état de ton i/o et d'assigner ta variable globale via un if conditionnel. #define bouton 3 int growingMode; void setup() { pinMode(bouton, IN